M. Dambrine, G. Gargantini, H. Harbrecht, J. Maynadier Shape optimization under constraints on the probability of a quadratic functional to exceed a given treshold. HAL hal-04772321
Problem statement.
We consider a structure
represented by a Lipschitz continuous bounded domain \(\Omega\). We suppose its boundary \(\partial\Omega\) to be divided in three disjoint
parts: \(\Gamma_D\) where the structure is clamped, \(\Gamma_N\)where a force \(g\) is applied and \(\Gamma_0\) to be optimised.
The displacement \(u\) solves the linear elasticity equations
\[
-\text{div}
\left(\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right) \right) =\mathbf{f} \text{ in } \Omega,
\]
\[
\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right)\mathbf{n} = \mathbf{g} \text{ on } \Gamma_N,
\]
\[
\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right)\mathbf{n} = \mathbf{0} \text{ on } \Gamma_0,
\]
\[
\mathbf{u}_{\Omega, \mathbf{g}} = \mathbf{0} \text{ on } \Gamma_D.
\]
We assume that the applied mechanical loads \(g\) are uncertain:
\[g(\omega) = g_0 + g_1 \alpha_1(\omega) + \ldots + g_N \alpha_N(\omega)
\qquad\qquad
\mbox{for almost all }\omega \in O,
\]
where \( (\alpha_1, \dots \alpha_N) \in L^2(O,\mathbb{R}) \)
are independent, real-valued random variables, and where the loadings
\( (g_0, \dots, g_N) \) are in \( H^{-1/2}{\Gamma_N} \).
The shape optimization problem
Let \(Q\) be a quadratic functional and two positive numbers \( \tau , \chi \). We consider the following shape optimization problem: Find the admissible shape \(\Omega \) minimizing the volume under the constraint
\[
\mathbb{P} [ Q(\mathbf{u}_{\Omega, \mathbf{g}}) > \tau ] \leq \chi,
\]
where the state \(\mathbf{u}_{\Omega, \mathbf{g}} \) satisfies the linear elasticity system for almost all \(\omega \in O\).
Contributions.
Genereric expression of the shape derivative.
We provide the expression of the shape derivative for an arbitrary law (see the paper for the expression). However, it is integral on a \( N \)
dimensional sphere. Using it requires to use Monte-Carlo method: it is extremely expensive.
Derivation of shape derivative.
In the particular case of a Gaussian law, we provide a explicit expression of the shape derivative that is cheap to compute.
See the paper for the expressions.
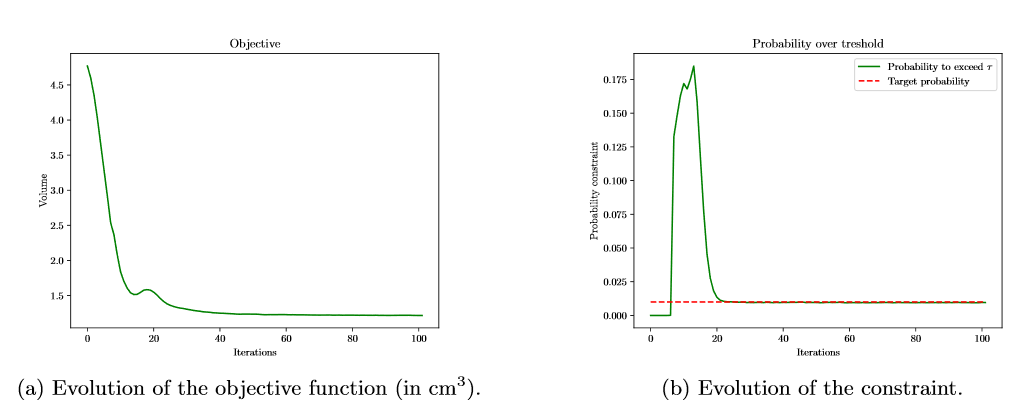
Numerical results
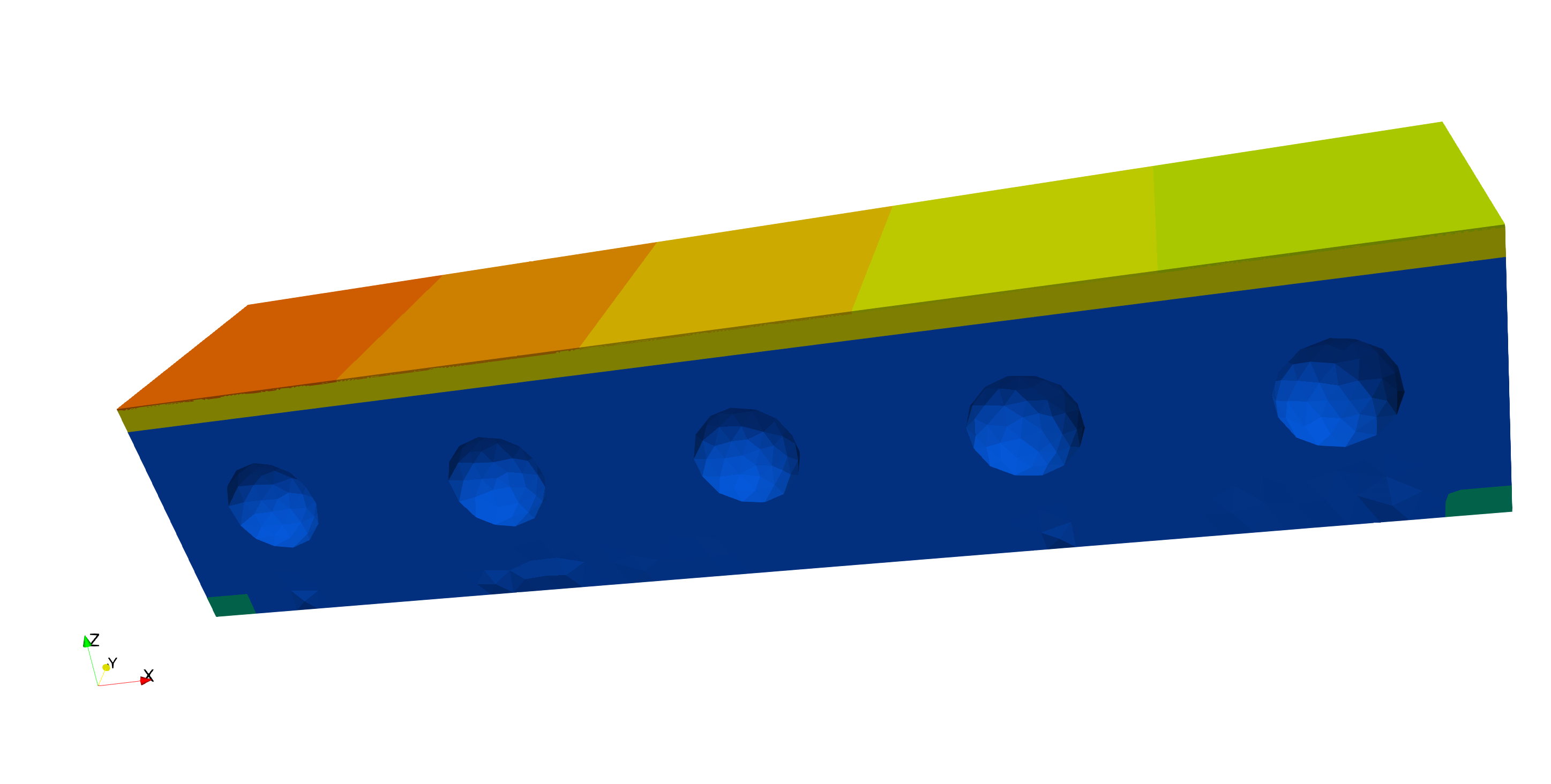
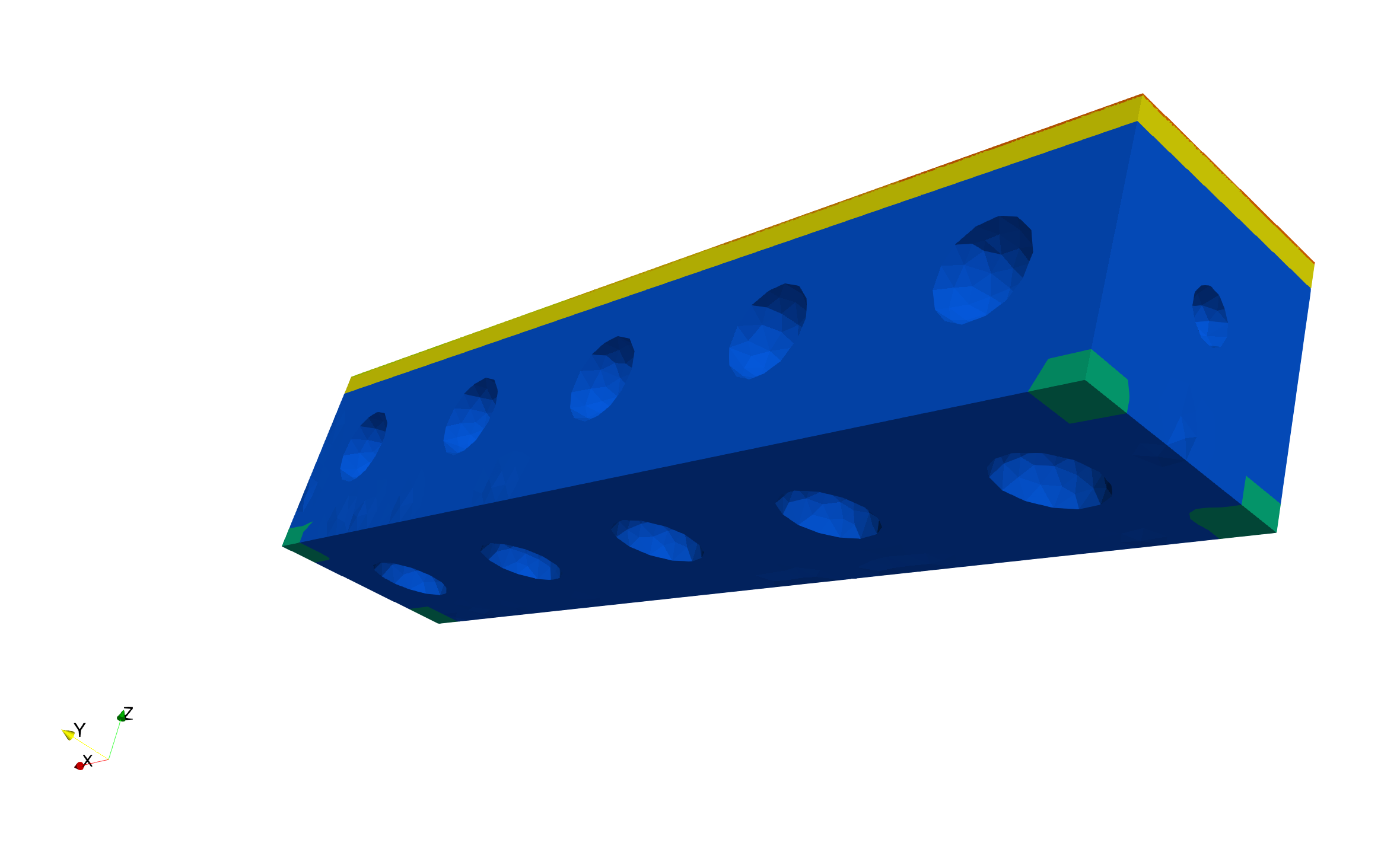
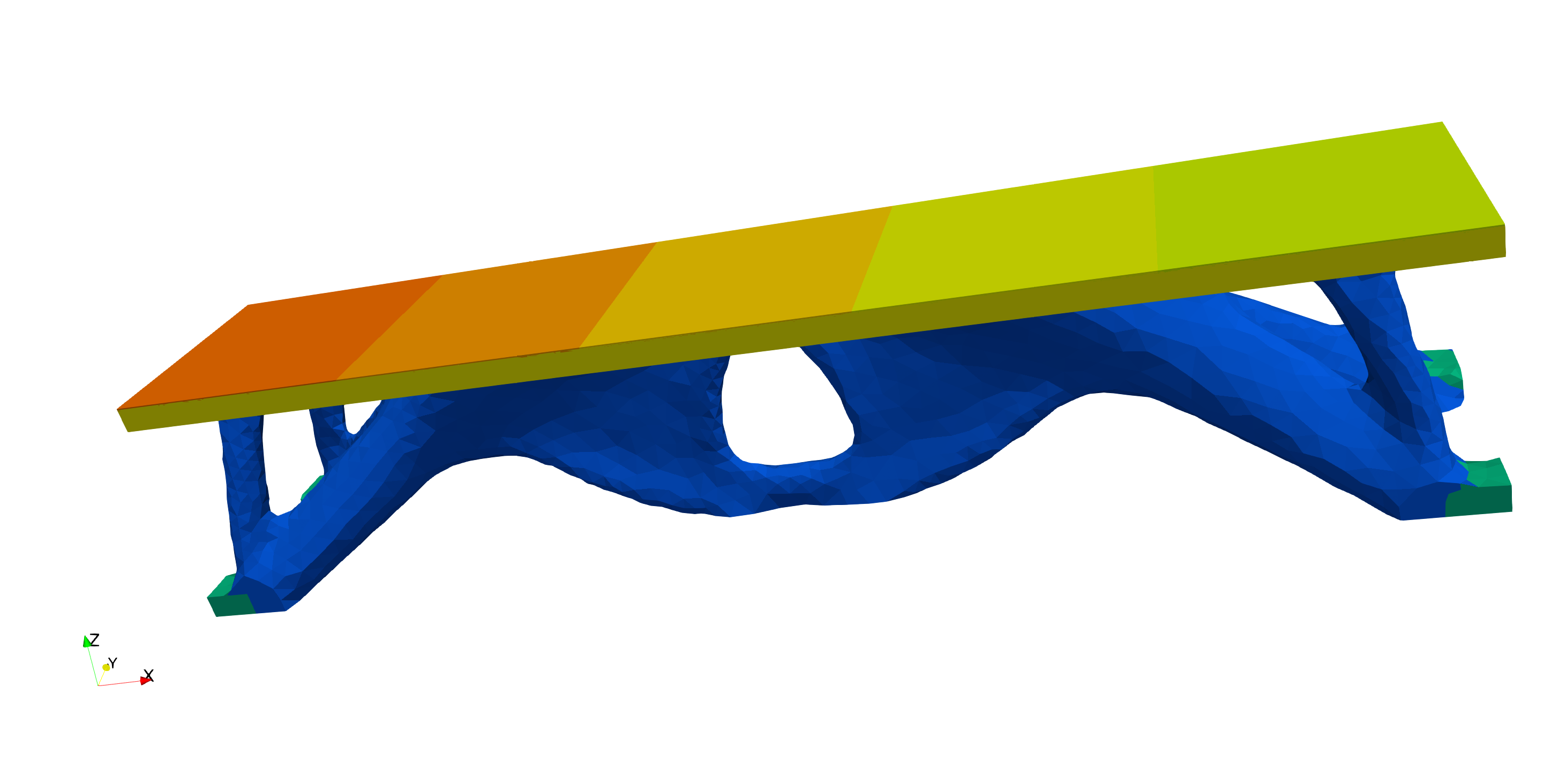
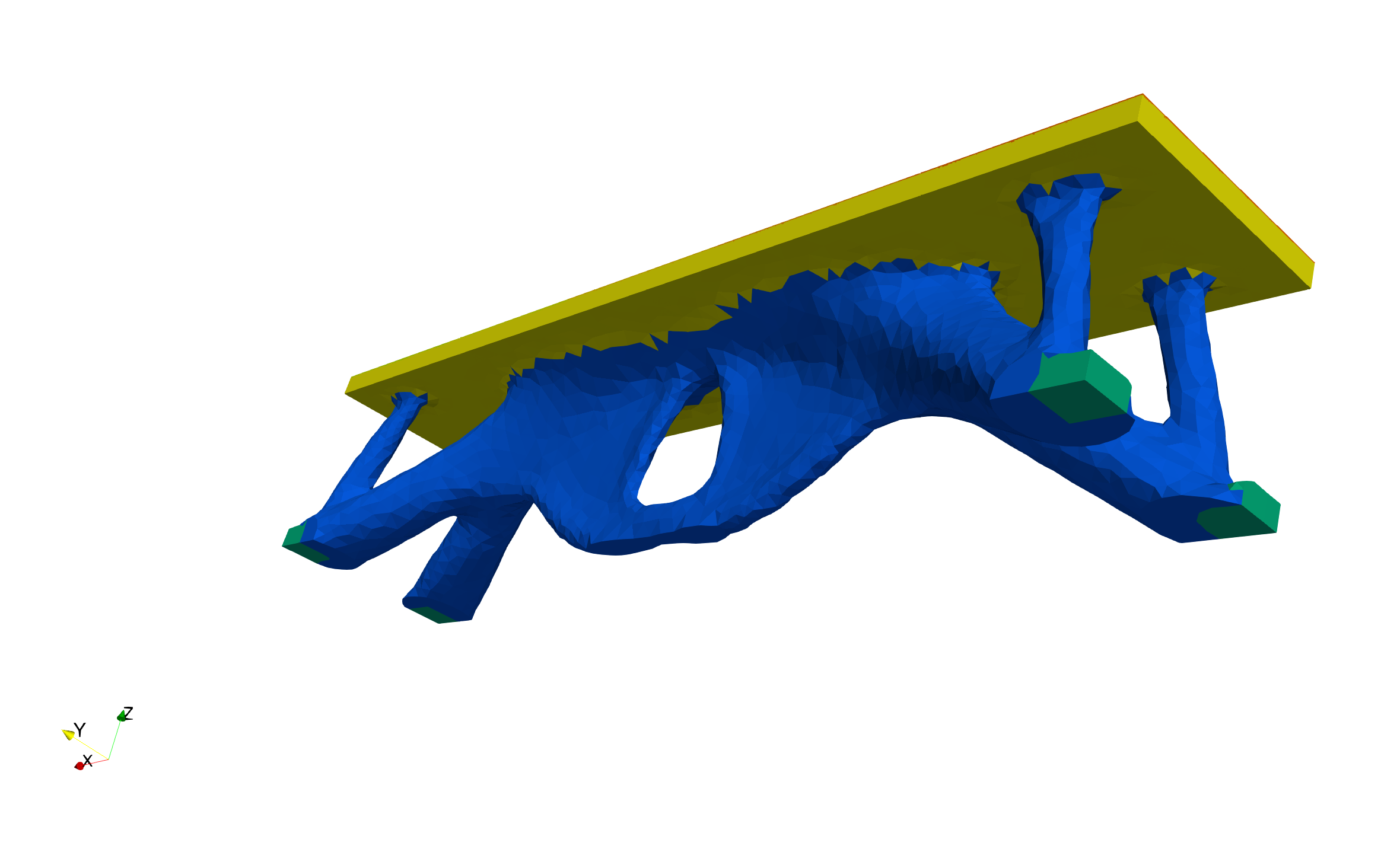
We consider a bridge clamped on the green edges. Random surface loads are applied on the table.
Inital shape: Left: top view
Right: bottom view. Optimized shape: Left: evolution of the objective Right: evolution of the constraint.