M. Dambrine, F. Caubet, G. Gargantini, J. Maynadier Shape optimization under a constraint on the worst case scenario SIAM Journal
on Scientific Computing, Vol. 46, Iss. 6, 2024
Problem statement.
We consider a structure
represented by a Lipschitz continuous bounded domain \(\Omega\). We suppose its boundary \(\partial\Omega\) to be divided in three disjoint
parts: \(\Gamma_D\) where the structure is clamped, \(\Gamma_N\)where a force \(g\) is applied and \(\Gamma_0\) to be optimised.
The displacement \(u\) solves the linear elasticity equations
\[
-\text{div}
\left(\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right) \right) =\mathbf{f} \text{ in } \Omega,
\]
\[
\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right)\mathbf{n} = \mathbf{g} \text{ on } \Gamma_N,
\]
\[
\boldsymbol{\sigma}\left(\mathbf{u}_{\Omega, \mathbf{g}}\right)\mathbf{n} = \mathbf{0} \text{ on } \Gamma_0,
\]
\[
\mathbf{u}_{\Omega, \mathbf{g}} = \mathbf{0} \text{ on } \Gamma_D.
\]
We assume that the applied mechanical
loads \(g\) are uncertain and bounded. They live in the ambiguity set \(G\).
We consider a constraint
\(H\) under the form
\[H(u,\Omega) = \int_{\Omega} j_(u) + j_1 (\nabla u) \]
Here, \(j_0 \) and \(j_1\) are two continuous functions.
We are interested in the worst possible loading \(g \in G\) and define
\[\Phi(\Omega) = \sup_{g\in G} H(u_g,\Omega) \leq \tau\]
where the displacement \(u_g\) solves the elasticity system.
We consider the following generic constrained optimization problem: Find the admissible shape \(\Omega\) minimizing the volume \(Vol(\Omega)\) under the constraint \(\Phi(\Omega) \leq \tau\)
where \(\tau \) denotes a given threshold not to be exceeded.
The difficulty to solve this problem lays in the fact that \(\Phi\) is not smooth.
Contributions.
Two different methods for solving
shape optimization problems under worst-case scenario constraints for a
given functional are presented and compared. No assumptions on the size
of the uncertainties are asserted. However, both methods require the
convexity of the constraint functional with respect to the
displacement.
First approach: reduction to a finite number of
constraints
The idea of engineers is to approximate the
original optimization problem by its version with a finite number \(N\) of scenari:
Find the admissible shape \(\Omega\) minimizing the
volume under the \(N\) inequality constraints:
\[ \forall i\in \{1,\dots,N\}, H(g_i,\Omega)\leq \tau .\]
On this approach, the main result of the paper is: under convexity assumptions, the solution of a sequence of shape
optimization problems with \(N\)scenari with an increasingly accurate approximation of the uncertain set
for the loadings converges when \(N\rightarrow\infty\) to a solution of the original problem in the
Hausdorff sense.
Second approach: using the subdifferential.
Another
approach to solve problem by a gradient-based method consists in
dealing directly with the worst-case criterion \(\Phi\). Our contribution is to prove the existence of a
subdifferentail with respect to the shape of \(\Phi\) and to compute it so that it can be used in a numerical scheme.
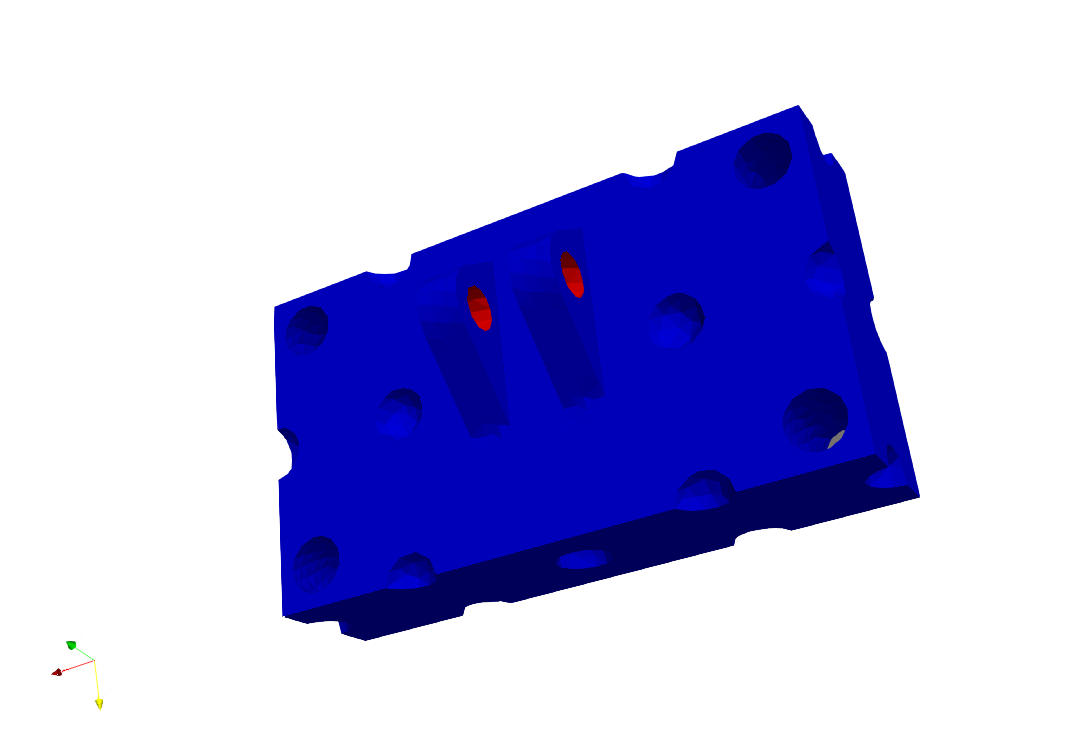
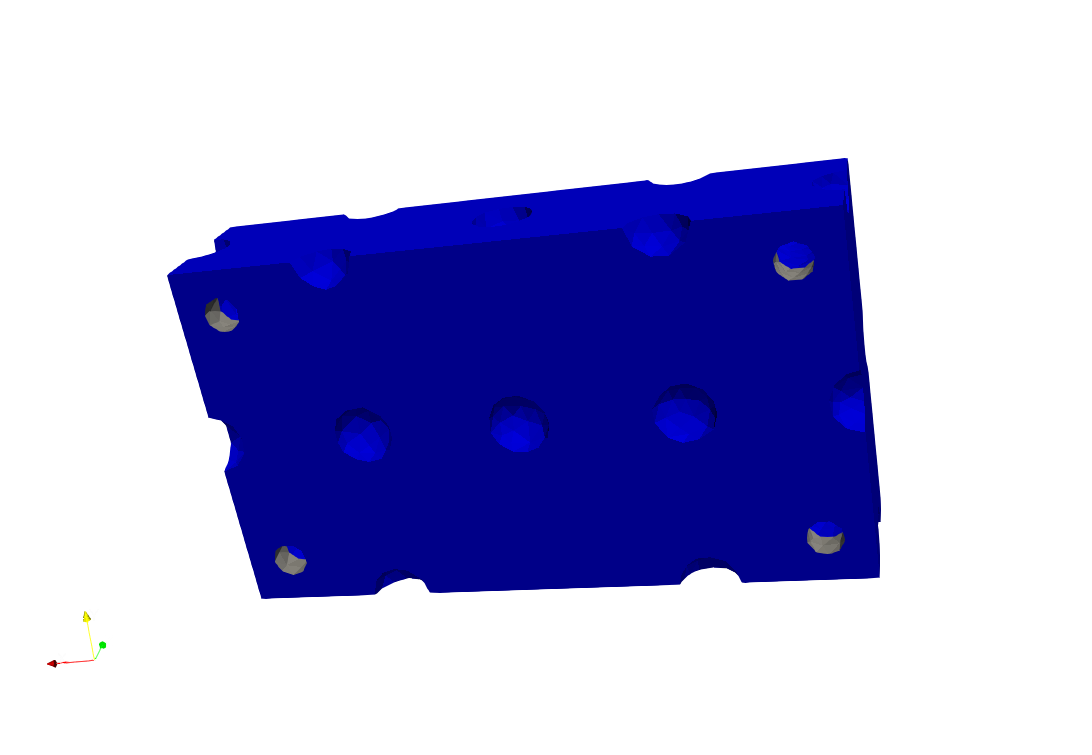
Numerical results: Optimal shape of a jet bracket.
We optimize a
bracket clamped
on the four corners ΓD marked in gray. A
uniform load of uncertain intensity and direction is applied on the red
region ΓN.
Left: Top view Right: Bottom view.
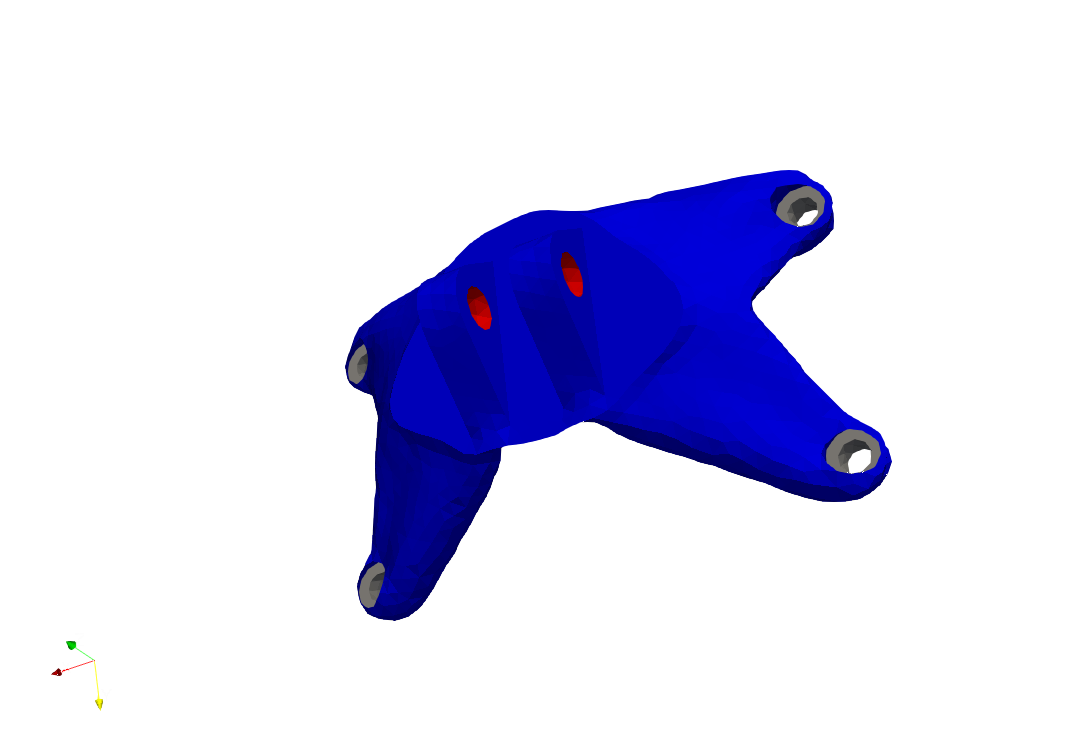
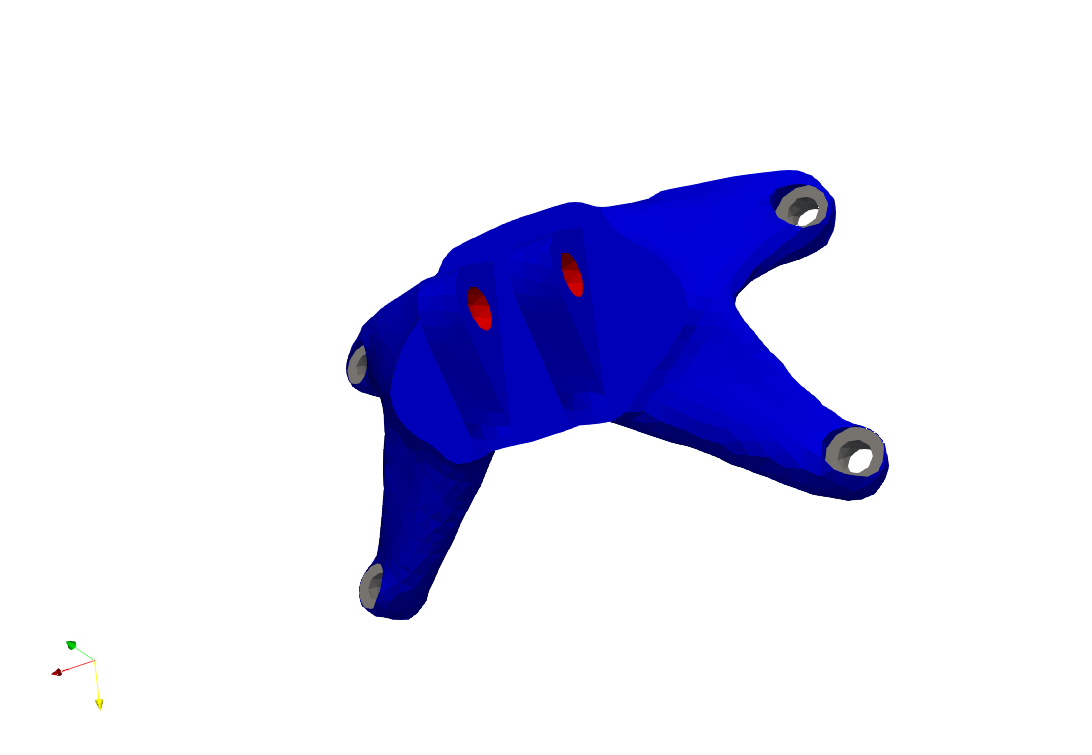
We aim to minimize its volume under a
constraint on the L6 norm of
the von Mises stress.
Left:by the polyhedron approach (10 constraints) Right: by the subdifferential approach.
Both approaches provides satisfactory results. The advantage of the subdifferential approach is a reduced computational cost.